Link to originalPlane Autonomous System of ODEs
Pair of ODEs in the form
Autonomous meaning there is no dependence in or
Plane meaning just two equations i.e.
Link to originalTrajectory or Phase Path
Let be solutions of the Plane Autonomous System of ODE
Given initial values and then there exists a unique solution called thein the phase plane
Link to originalPhase Plane
The plane that the trajectories / phase path lie in
Used to visualise the paths
Link to originalTrajectories are identical with time offsets
If is a solution of Plane Autonomous ODE
For any fixed number thensolves the same ODE and they trace the same trajectory
Proof
Similarly we have
Only works as the system is autonomous
Link to originalUnique Trajectory
Through every point then there exists a
with different trajectories never intersecting
However they may asymptote to same point as or
Proof - Tip
Relies on the fact that Picard guarantees the existence of a solution
2.1 Critical Points and Closed Trajectories
Link to originalCritical Point
Let be a point in the phase plane then
is a critical point if
This results in a special trajectory where the solutions are constant in time
Link to originalClosed Solutions
Trajectories in the phase plane that are closed in the phase plane (return to the same point)
Link to originalClosed Solutions are Periodic
Assuming that they aren’t constant solutions then
Closed Solutions in the Phase plane are also Periodic Solutions
Proof
Suppose the trajectory is closed so for some finite value of then
while
Defining
So then as shown before by uniqueness then is another solution
As we have
So by uniqueness of the solution (given Lipschitz) then
for all hence closed trajectory corresponds to a periodic solution
Refer to Lecture Notes for more Examples! (pg ~ )
2.2 Stability and Linearisation
Link to originalStable Critical Point
Critical point is stable if for there exists and such that for
Any solution for which then
Note that you can use other norms such as or
Link to originalUnstable Critical Point
Critical point that is not stable
Link to originalGeneral Solution of the Linearised System at a Critical Point
Suppose is a critical point for Plane Autonomous ODE so linearising around
Let with equation where
Let be the eigenvalues of then
For we have general solution
for constants
For we have general solutions
- If then so we have solution
for any constant vector
2) If then there exists constant vector withwhere is the one linearly independent eigenvector of so we get general solution
for constantsProof
We do this by linearising around the point
Suppose is a critical point for Plane Autonomous ODE so
Hence and is a constant solution for Plane Autonomous ODE
So linearise by settingwhere and are small
So using Taylor’s Theorem
By neglecting higher order terms we can write it in matrix form
where
By setting then we have equation
Solving with eigen-vectors and eiven-values then
is a solution with constant vector and constant scalar ifThat is, is an eigen-vector of with eigen-value
Suppose the eigen-values of the matrix is
For we have general solution
for constants
For then by Cayley Hamilton Theorem since we have
- If then so we have solution
for any constant vector
2) If then there exists constant vector withbut
where is the one linearly independent eigenvector of so we get general solution
2.3 Classification of Critical Points
Link to originalNon-Degenerate Critical Point
Critical Point is non-degenerate if eigenvalue of are all not
Link to originalClassification of Critical Points
Assuming critical point is non-degenerate
If that happens we would have to need to have more terms in the Taylor Expansion making it much harderLet be the eigenvalues of with
Note that a centre in linearisation does not imply a centre in the non-linear system (rest are fine)
Case 1: (both real)
Node Stability: UNSTABLE
Proof
So from the General Solution of the Linearised System at a Critical Point then
As then and unless then
As then and unless thenSo the trajectories converge onto critical point into past but go to infinity in the future
Hence unstable
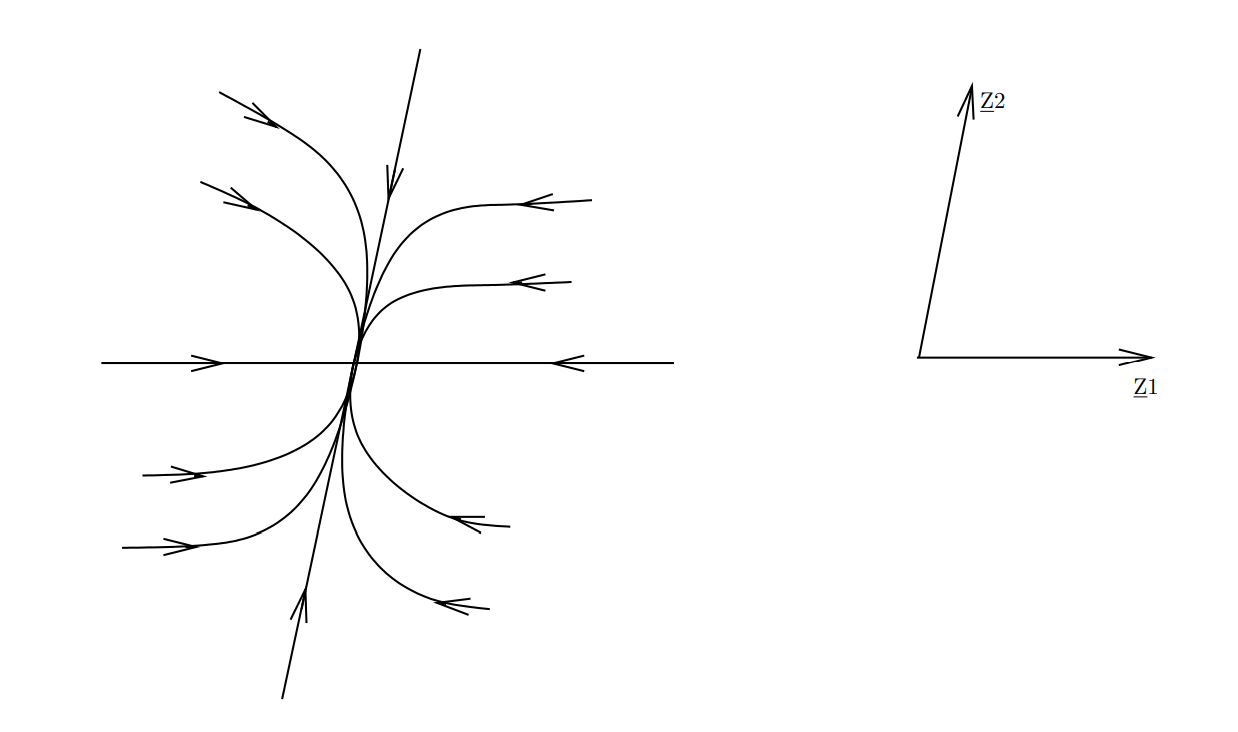
Case 2: (both real)
Node Stability: STABLE
Proof
Identical to Case but with and roles of switched
So the trajectories converge onto critical point into future but come from infinity in the past
Hence stable
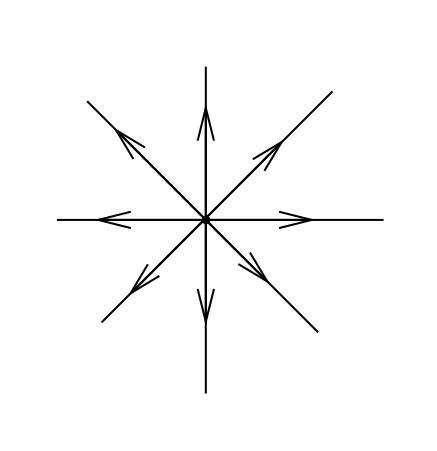
Case 3:
Node Stability:
Proof
If then we have a star as
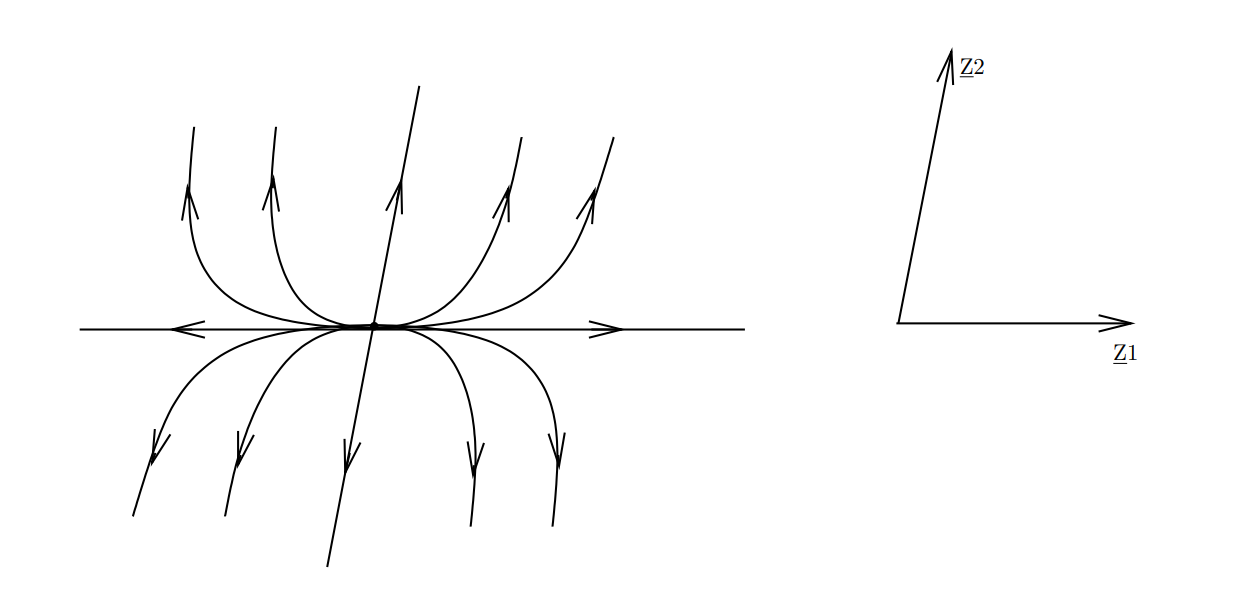
If then we have inflected node as
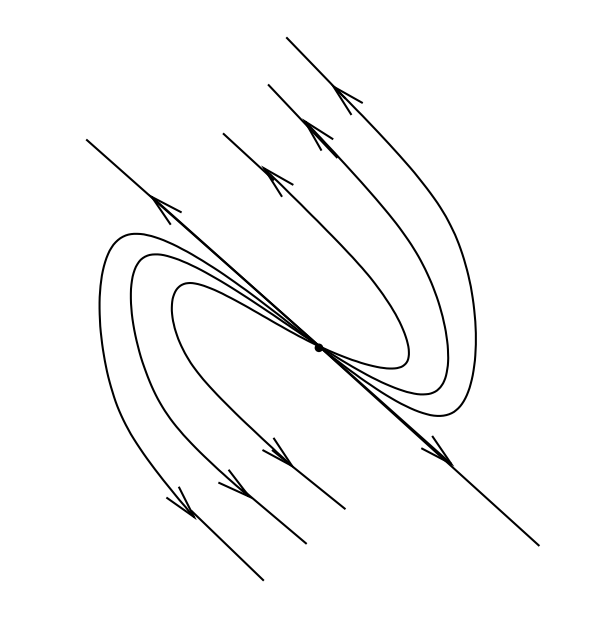
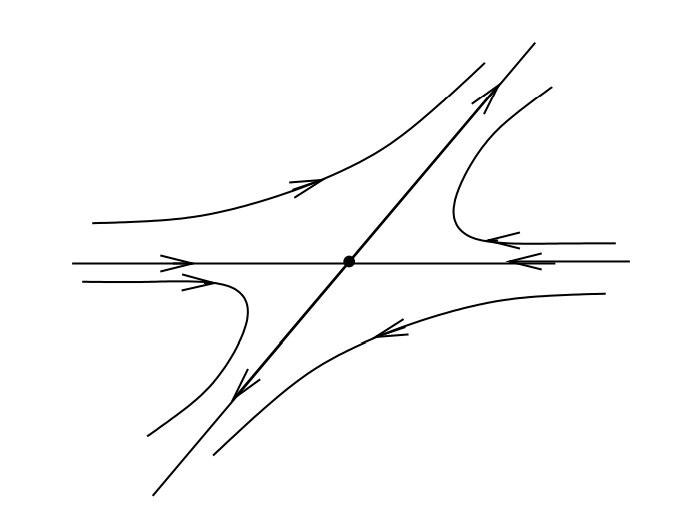
Case 4: (both real)
Node Stability: SADDLE (UNSTABLE)
Proof
We have general form
If thenIf then
If then
So we have that most trajectories come in approximately parallel to
and then asymptotic to
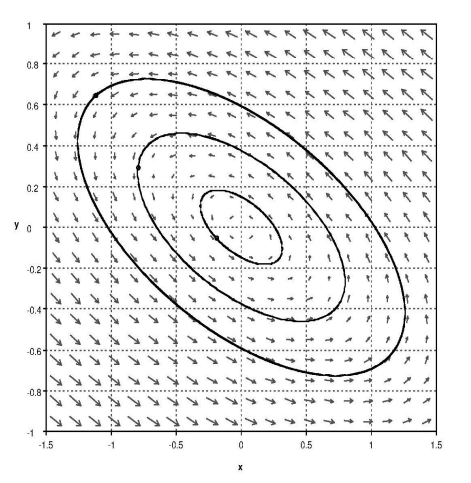
Case 5: for some
Node Stability: CENTRE (STABLE)
Proof
We have that are a conjugate pair so put and then
So that
So is periodic and hence stable
Case 6: for some
Node Stability: SPIRAL
Proof
We have that are a conjugate pair so put and then
So that
If then as so trajectory spirals out into future
Hence we have an unstable spiralIf we have a time reversal of previous case so it spirals in
Hence we have a stable spiralNote that we can do case using matrices (refer to page in lecture notes)
Link to originalNullclines
Curves where Curves where or
Note that critical points occur where the nullclines intersect
Link to originalDrawing Phase Diagrams
It is useful to draw the nullclines in order to find regions of the signs of and
As this gives us 4 cases for the arrow direction
and then we have the trivial cases where either or
Refer to Lecture Notes for more Examples! (pg ~ )
2.4 The Bendixson-Dulac Theorem
06 - Bendixson-Dulac Theorem
Link to originalBendixson-Dulac Theorem
Consider system and with
If there exists a function within a simply connected region then
There can be no non-trivial closed trajectory lying entirely in
Proof
Note that a non-trivial trajectory that is not just a fixed point
Suppose is a closed trajectory lying entirely in
Let be the disc (lies entirely in , as is simply connected) whose boundary isApplying Green’s Theorem in the Plane then consider integral
However on then and which is zero
This contradicts positivity of so there can be no such
2.4.1 Corollary
Link to originalBendixson's Criterion corollary
If
has fixed sign in simply connected region then
There are no non-trivial closed trajectories lying entirely in
Proof
Use Bendixson-Dulac Theorem with or